Single Node, Single GPU Training
Once you have a Union account, install union:
pip install unionExport the following environment variable to build and push images to your own container registry:
# replace with your registry name
export IMAGE_SPEC_REGISTRY="<your-container-registry>"Then run the following commands to run the workflow:
$ git clone https://github.com/unionai/unionai-examples
$ cd unionai-examples
$ union run --remote <path/to/file.py> <workflow_name> <params>The source code for this tutorial can be found here.
1.
As long as the Docker image is built correctly with the right version of the GPU drivers and the Flyte backend is
provisioned to have GPU machines, Flyte will execute the task on a node that has GPU(s).
Currently, Flyte does not provide any specific task type for PyTorch (though it is entirely possible to provide a task-type
that supports PyTorch-Ignite or PyTorch Lightning support, but this is not critical). One can request for a GPU, simply
by setting GPU=“1” resource request and then at runtime, the GPU will be provisioned.
In this example, we’ll see how we can create any PyTorch model, train it using Flyte and a specialized container. The following video will outline the basics of this process.
First, let’s import the libraries.
import json
import os
import typing
from dataclasses import dataclass
import torch
import torch.nn.functional as F
import wandb
from dataclasses_json import dataclass_json
from flytekit import Resources, task, workflow
from flytekit.types.file import PythonPickledFile
from torch import distributed as dist
from torch import nn, optim
from torchvision import datasets, transformsLet’s define some variables to be used later. The following variables are specific to wandb:
NUM_BATCHES_TO_LOG: Number of batches to log from the test data for each test stepLOG_IMAGES_PER_BATCH: Number of images to log per test batch
NUM_BATCHES_TO_LOG = 10
LOG_IMAGES_PER_BATCH = 32If running remotely, copy your wandb API key to the Dockerfile under the environment variable WANDB_API_KEY.
This function logs into wandb and initializes the project. If you built your Docker image with the
WANDB_USERNAME, this will work. Otherwise, replace my-user-name with your wandb user name.
We’ll call this function in the pytorch_mnist_task defined below.
def wandb_setup():
wandb.login()
wandb.init(
project="mnist-single-node-single-gpu",
entity=os.environ.get("WANDB_USERNAME", "my-user-name"),
)Creating the Network
We use a simple PyTorch model with {py:class}torch:torch.nn.Conv2d and {py:class}torch:torch.nn.Linear layers.
Let’s also use {py:func}torch:torch.nn.functional.relu, {py:func}torch:torch.nn.functional.max_pool2d, and
{py:func}torch:torch.nn.functional.relu to define the forward pass.
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 20, 5, 1)
self.conv2 = nn.Conv2d(20, 50, 5, 1)
self.fc1 = nn.Linear(4 * 4 * 50, 500)
self.fc2 = nn.Linear(500, 10)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, 2, 2)
x = F.relu(self.conv2(x))
x = F.max_pool2d(x, 2, 2)
x = x.view(-1, 4 * 4 * 50)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return F.log_softmax(x, dim=1)The Data Loader
def mnist_dataloader(batch_size, train=True, **kwargs):
return torch.utils.data.DataLoader(
datasets.MNIST(
"./data",
train=train,
download=True,
transform=transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]),
),
batch_size=batch_size,
shuffle=True,
**kwargs,
)Training
We define a train function to enclose the training loop per epoch, i.e., this gets called for every successive epoch.
Additionally, we log the loss and epoch progression, which can later be visualized in a wandb dashboard.
def train(model, device, train_loader, optimizer, epoch, log_interval):
model.train()
# hooks into the model to collect gradients and the topology
wandb.watch(model)
# loop through the training batches
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device) # device conversion
optimizer.zero_grad() # clear gradient
output = model(data) # forward pass
loss = F.nll_loss(output, target) # compute loss
loss.backward() # propagate the loss backward
optimizer.step() # update the model parameters
if batch_idx % log_interval == 0:
print(
"Train Epoch: {} [{}/{} ({:.0f}%)]\tloss={:.4f}".format(
epoch,
batch_idx * len(data),
len(train_loader.dataset),
100.0 * batch_idx / len(train_loader),
loss.item(),
)
)
# log epoch and loss
wandb.log({"loss": loss, "epoch": epoch})We define a test logger function which will be called when we run the model on test dataset.
def log_test_predictions(images, labels, outputs, predicted, my_table, log_counter):
"""
Convenience function to log predictions for a batch of test images
"""
# obtain confidence scores for all classes
scores = F.softmax(outputs.data, dim=1)
# assign ids based on the order of the images
for i, (image, pred, label, score) in enumerate(
zip(*[x.cpu().numpy() for x in (images, predicted, labels, scores)])
):
# add required info to data table: id, image pixels, model's guess, true label, scores for all classes
my_table.add_data(f"{i}_{log_counter}", wandb.Image(image), pred, label, *score)
if i == LOG_IMAGES_PER_BATCH:
breakEvaluation
We define a test function to test the model on the test dataset.
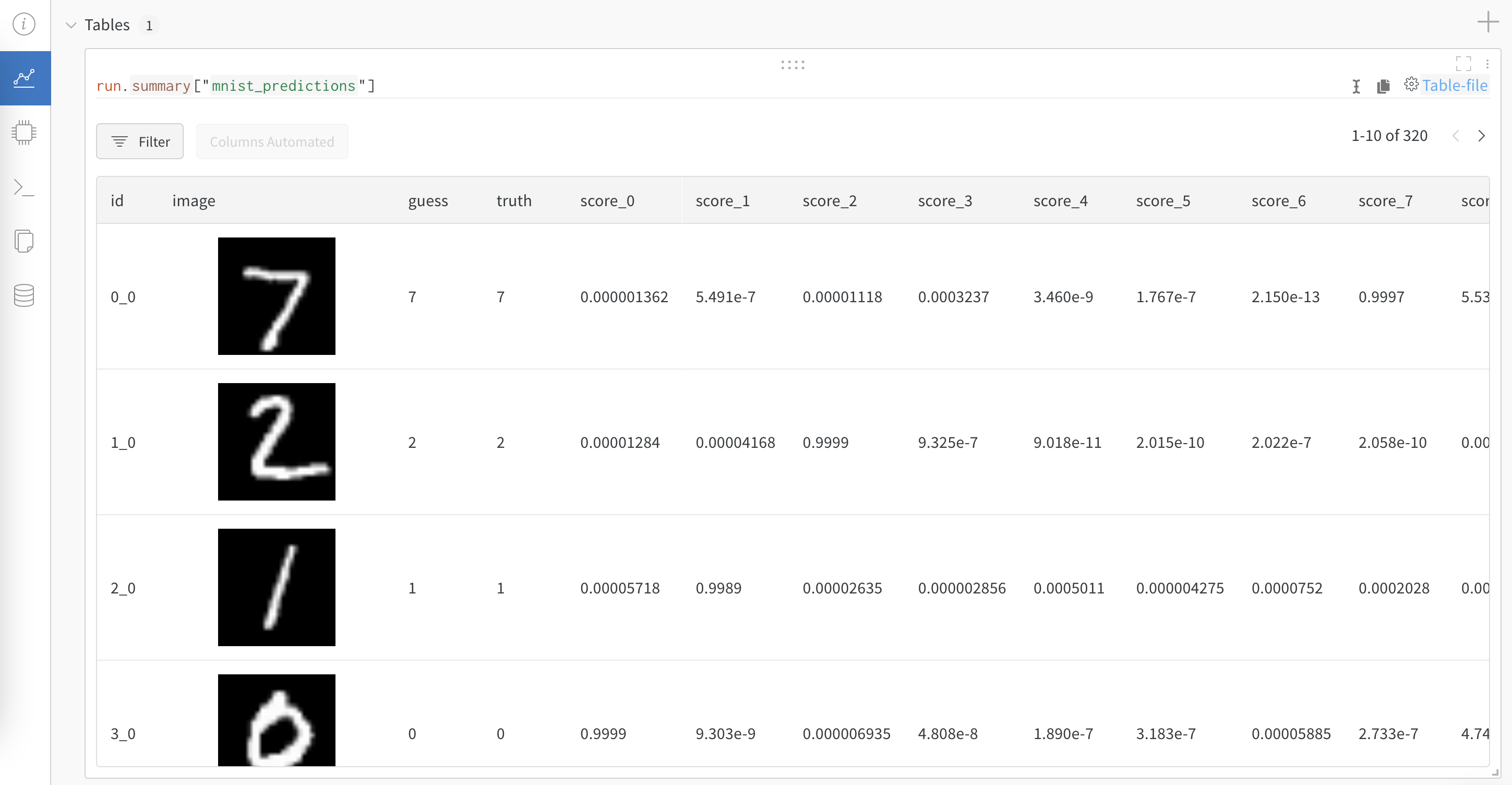
We log accuracy, test_loss, and a wandb
table.
The wandb table can help in depicting the model’s performance in a structured format.
def test(model, device, test_loader):
# ``wandb`` tabular columns
columns = ["id", "image", "guess", "truth"]
for digit in range(10):
columns.append("score_" + str(digit))
my_table = wandb.Table(columns=columns)
model.eval()
# hooks into the model to collect gradients and the topology
wandb.watch(model)
test_loss = 0
correct = 0
log_counter = 0
# disable gradient
with torch.no_grad():
# loop through the test data loader
for images, targets in test_loader:
images, targets = images.to(device), targets.to(device) # device conversion
outputs = model(images) # forward pass -- generate predictions
test_loss += F.nll_loss(outputs, targets, reduction="sum").item() # sum up batch loss
_, predicted = torch.max(outputs.data, 1) # get the index of the max log-probability
correct += (predicted == targets).sum().item() # compare predictions to true label
# log predictions to the ``wandb`` table
if log_counter < NUM_BATCHES_TO_LOG:
log_test_predictions(images, targets, outputs, predicted, my_table, log_counter)
log_counter += 1
# compute the average loss
test_loss /= len(test_loader.dataset)
print("\naccuracy={:.4f}\n".format(float(correct) / len(test_loader.dataset)))
accuracy = float(correct) / len(test_loader.dataset)
# log the average loss, accuracy, and table
wandb.log({"test_loss": test_loss, "accuracy": accuracy, "mnist_predictions": my_table})
return accuracyHyperparameters
We define a few hyperparameters for training our model.
@dataclass_json
@dataclass
class Hyperparameters(object):
"""
Args:
backend: pytorch backend to use, e.g. "gloo" or "nccl"
sgd_momentum: SGD momentum (default: 0.5)
seed: random seed (default: 1)
log_interval: how many batches to wait before logging training status
batch_size: input batch size for training (default: 64)
test_batch_size: input batch size for testing (default: 1000)
epochs: number of epochs to train (default: 10)
learning_rate: learning rate (default: 0.01)
"""
backend: str = dist.Backend.GLOO
sgd_momentum: float = 0.5
seed: int = 1
log_interval: int = 10
batch_size: int = 64
test_batch_size: int = 1000
epochs: int = 10
learning_rate: float = 0.01Training and Evaluating
The output model using {py:func}torch:torch.save saves the state_dict as described
in pytorch docs.
A common convention is to have the .pt extension for the model file.
Note the usage of requests=Resources(gpu="1"). This will force Flyte to allocate this task onto a machine with GPU(s).
The task will be queued up until a machine with GPU(s) can be procured. Also, for the GPU Training to work, the
Dockerfile needs to be built as explained in the {ref}pytorch-dockerfile section.
TrainingOutputs = typing.NamedTuple(
"TrainingOutputs",
epoch_accuracies=typing.List[float],
model_state=PythonPickledFile,
)Set memory, gpu and storage depending on whether we are trying to register against sandbox or not…
if os.getenv("SANDBOX") != "":
print(f"SANDBOX ENV: '{os.getenv('SANDBOX')}'")
mem = "100Mi"
gpu = "0"
else:
print(f"SANDBOX ENV: '{os.getenv('SANDBOX')}'")
mem = "3Gi"
gpu = "1"
@task(
retries=2,
cache=True,
cache_version="1.0",
requests=Resources(gpu=gpu, mem=mem),
limits=Resources(gpu=gpu, mem=mem),
)
def pytorch_mnist_task(hp: Hyperparameters) -> TrainingOutputs:
wandb_setup()
# store the hyperparameters' config in ``wandb``
wandb.config.update(json.loads(hp.to_json()))
# set random seed
torch.manual_seed(hp.seed)
# ideally, if GPU training is required, and if cuda is not available, we can raise an exception
# however, as we want this algorithm to work locally as well (and most users don't have a GPU locally), we will fallback to using a CPU
use_cuda = torch.cuda.is_available()
print(f"Use cuda {use_cuda}")
device = torch.device("cuda" if use_cuda else "cpu")
# load data
kwargs = {"num_workers": 1, "pin_memory": True} if use_cuda else {}
training_data_loader = mnist_dataloader(hp.batch_size, train=True, **kwargs)
test_data_loader = mnist_dataloader(hp.batch_size, train=False, **kwargs)
# train the model
model = Net().to(device)
optimizer = optim.SGD(model.parameters(), lr=hp.learning_rate, momentum=hp.sgd_momentum)
# run multiple epochs and capture the accuracies for each epoch
# train the model: run multiple epochs and capture the accuracies for each epoch
accuracies = []
for epoch in range(1, hp.epochs + 1):
train(model, device, training_data_loader, optimizer, epoch, hp.log_interval)
accuracies.append(test(model, device, test_data_loader))
# after training the model, we can simply save it to disk and return it from the Flyte task as a {py:class}`flytekit.types.file.FlyteFile`
# type, which is the ``PythonPickledFile``. ``PythonPickledFile`` is simply a decorator on the ``FlyteFile`` that records the format
# of the serialized model as ``pickled``
model_file = "mnist_cnn.pt"
torch.save(model.state_dict(), model_file)
return TrainingOutputs(epoch_accuracies=accuracies, model_state=PythonPickledFile(model_file))Finally, we define a workflow to run the training algorithm. We return the model and accuracies.
@workflow
def pytorch_training_wf(hp: Hyperparameters = Hyperparameters(epochs=10, batch_size=128)) -> TrainingOutputs:
return pytorch_mnist_task(hp=hp)Running the Model Locally
It is possible to run the model locally with almost no modifications (as long as the code takes care of resolving if the code is distributed or not). This is how we can do it:
if __name__ == "__main__":
model, accuracies = pytorch_training_wf(hp=Hyperparameters(epochs=10, batch_size=128))
print(f"Model: {model}, Accuracies: {accuracies}")Weights & Biases Report
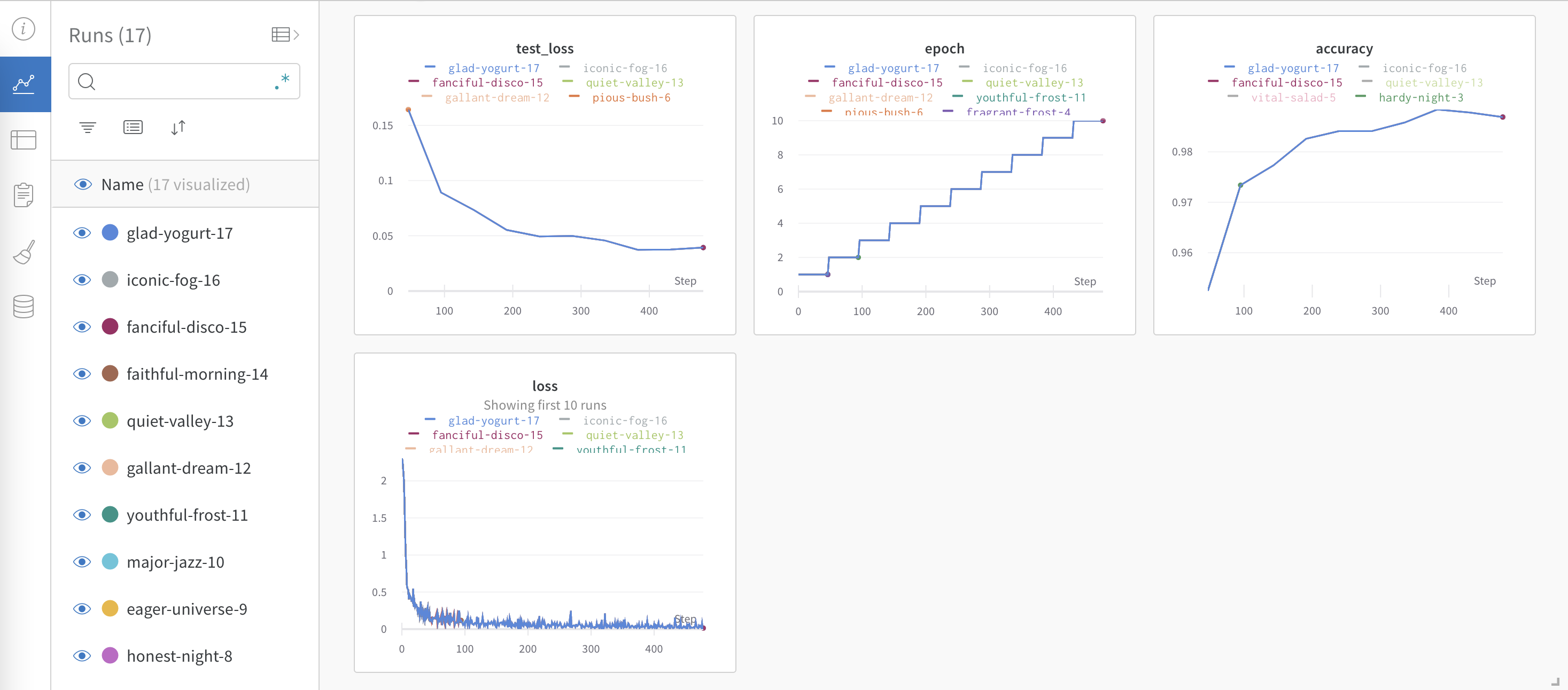
Lastly, let’s look at the reports that are generated by the model.
:::{figure}
https://raw.githubusercontent.com/flyteorg/static-resources/main/flytesnacks/tutorials/pytorch/single-node/wandb_graphs.png
:alt: Wandb Graphs
:class: with-shadow
Wandb Graphs
:::
:::{figure}
https://raw.githubusercontent.com/flyteorg/static-resources/main/flytesnacks/tutorials/pytorch/single-node/wandb_table.png
:alt: Wandb Table
:class: with-shadow
Wandb Table
:::
You can refer to the complete wandb report
here.
:::{tip}
A lot more customizations can be done to the report according to your requirement!
:::
{kind=link}
{kind=link}